# Set the path to the simulation setup file
cwd = os.path.abspath('..')
session_path = os.path.join(cwd, 'SIMsalabim','ZimT')
zimt_device_parameters = os.path.join(session_path, 'simulation_setup.txt')
# Set the hysteresis simulation parameters
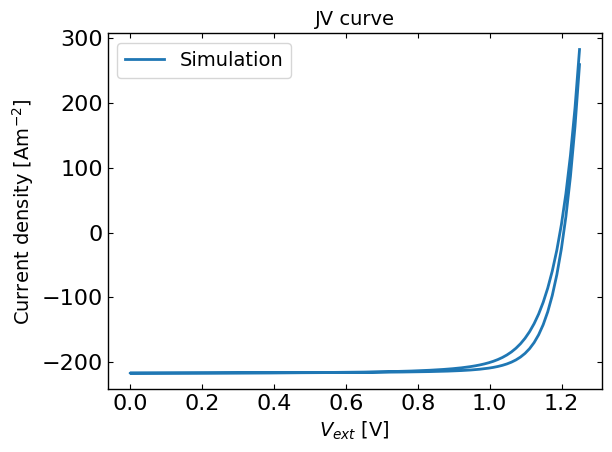
scan_speed = 10
direction = -1
G_frac = 1
tVG_name = os.path.join(session_path,'tVG.txt')
Vmin = 0.0
Vmax = 1.25
steps = 200
# Run the hysteresis simulation
ret, mess, rms = Hysteresis_JV(zimt_device_parameters, session_path, 0, scan_speed, direction, G_frac, tVG_name, run_mode=False, Vmin=Vmin, Vmax=Vmax, steps = steps, expJV_Vmin_Vmax='', expJV_Vmax_Vmin='',rms_mode='lin',threadsafe=False)